Содержание
Но зачем?
Актуальная задача для космонавтики в ближней и среднесрочной перспективе — это доставка полезного груза на Марс (желательно — адресная, с точностью в сотни и десятки метров). Роверы, автоматические станции, дроны, колонисты. И эта задача уже неоднократно решалась, причем с активным использованием разреженной атмосферы Марса, но размеры эллипсов рассеивания для традиционных капсульных спускаемых аппаратов все еще имеют порядок десяти км (для Perseverance — 7,7 км * 6,6 км)
На примерах предложенной в 90-ых годах прошлого века миссии AEOLUS и создаваемого уже в наше время, наши дни SpaceX-ом «Старшипа» показаны возможности аэродинамического маневрирования в атмосфере Марса и особенности, которые более слабая гравитация и разреженная атмосфера Марса накладывают на облик КА, предназначенных для маневра аэрозахвата и управляемого гиперзвукового полета в атмосфере Марса.
Особенности атмосферы
Во-первых, атмосфера Марса намного менее плотная, чем земная. Но и на Земле аэродинамическое торможение начинается на высоте ~80 км, где плотность воздуха составляет всего 0,00002 кг/м3 (в скоростном напоре скорость в квадрате побеждает плотность)
Если воспользоваться представленной центром Гленна НАСА моделью марсианской атмосферы, то:
Можно выделить коридор ~ 15 — 45 км, где плотности соответствуют «земному» коридору аэродинамического торможения ~ 40 — 60 км
Плотность атмосферы в более слабом гравитационном колодце убывает с высотой не так быстро, атмосфера Марса действительно подходит для торможения с параболических скоростей
В начальном этапе аэроторможения можно попробовать полет с отрицательной подъемной силой, чтобы компенсировать слабую гравитацию Марса
Самый интересный случай — это аэроторможение в вершине переходной «гомановской» траектории.
Высота входа в верхние слои атмосферы: 125 км;
Скорость: 6,1 — 7 км/с;
Угол снижения: 10 — 15 градусов.
AEOLUS
Миссия AEOLUS была предложена в начале 90-ых годов XX века специалистами NASA для доставки нескольких миниатюрных метеостанций и роверов сразу в нескольких удаленных друг от друга регионах.
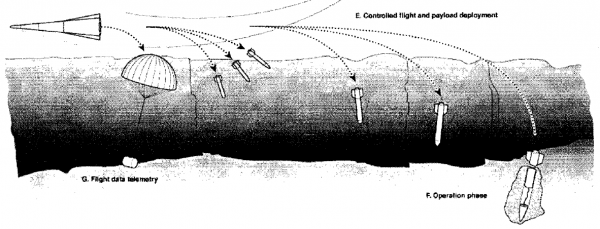
Принципиальная схема миссии AEOLUS. С борта активно маневрирующего планера на всем протяжении полета сбрасываются метеостанции и мини-роверы
Средством доставки должен был выступить КА оригинальной компоновки по схеме «оперенный конус» с пусковыми трубками в хвостовом отсеке, из которых при пролете над выбранными планетологами целями должны были отстреливаться капсулы-«спасательные жилеты» с полезной нагрузкой внутри.
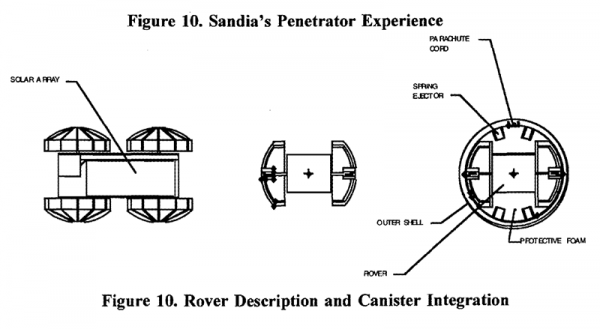
Миниатюрный (5 кг, 40см * 20 см) ровер, доставляемый AEOLUSом в амортизированном контейнереСлайды. Их много
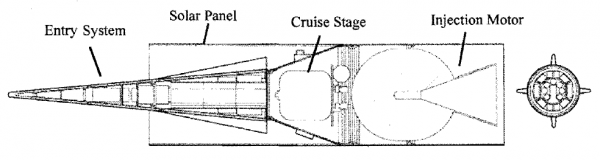
AEOLUS в полетной конфигурации (с небольшой маневровой ДУ на хвостовом отсеке), полупогруженный в цилиндрический отсек, несущий на себе солнечные батареи
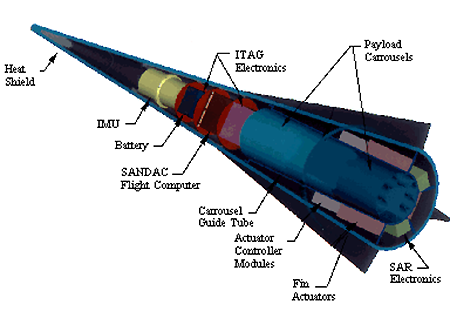
Разрез AEOLUSа. Внутри хвостового отсека установлен радар с синтезируемой апертурой и револьверная установка для отстрела полезной нагрузки

SWERVE — предшественник AEOLUS в демонстрационном зале компании SANDIA
Высокоточная доставка НАУКИ! на поверхность берет начало из миссии предшественника AEOLUS-а — SWERVE, высокоточного боевого блока для МБР, которым предполагалось поражать советские пусковые установки в районах базирования, защищенных ПРО. В оригинале оперенный доставщик (не)МИРНОГО АТОМА должен был отклониться от баллистической траектории с высоты ~ 30 — 40 км, тем самым обманув ожидания систем ПВО/ПРО (которые готовились поражать цели на основе пролонгированных баллистических траекторий) и перейти на краткий (~ 100 км) участок аэродинамического полета.
Похожую схему оперенного конуса использовал и самонаводящийся блок ракеты Pershing-2.

Першинг-2. Оружие холодной войны, сочетавшее аэродинамический маневр с наведением по карте местности. Возможный прототип SWERVE
Однако «холодная» война закончилась, и компания SANDIA предоставила свое детище NASA. Проведенные работы показали, что AEOLUS вполне способен погасить параболическую скорость и совершить длительный (~ 12000 км) гиперзвуковой полет в марсианской атмосфере. Попытаемся повторить расчеты НАСА, а заодно взглянем на особенности аэрозахвата.
Аэродинамика AEOLUS
Трехмерка AEOLUS, которую скормили программе для расчета аэродинамики КА из предыдущей статьи
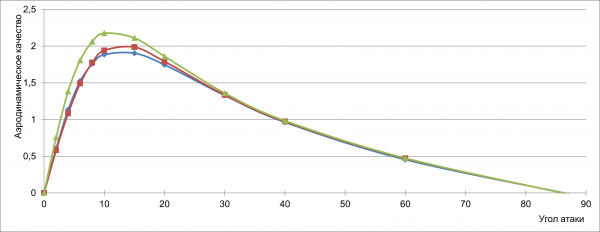
Аэродинамическое качество AEOLUS
Предварительная оценка показала, что вытянутый (относительное удлинение 5,5) оперенный конус действительно имеет высокое аэродинамическое качество (~ 2,1 — 2,2) и небольшой коэффициент лобового сопротивления (~ 0,09 — 0,12). Баллистический коэффициент AEOLUS составляет ~ 6360 кг / м2. Маневрирование в путевом канале позволяет отклониться в боковом канале от начального курса на 1900 км.
Из-за большого баллистического коэффициента AEOLUS рассеивает кинетическую энергию медленно, и вход в плотные слои атмосферы с постоянным углом атаки приводит к отскоку с переходом на высокоэллиптическую орбиту, что приемлемо для беспилотной миссии, но нежелательно для пилотируемой. Эту проблему можно решить знакопеременным маневром в плоскости тангажа (чтобы «средняя» подъемная сила была равна нулю)
Траектория AEOLUS
Траектория AEOLUS-а на участках торможения и основного полета
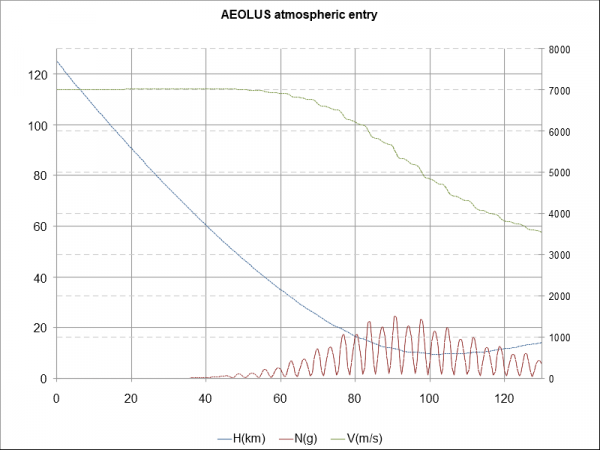
Участок торможения до околокруговой скорости Красный график — перегрузка с пиком в 25g в районе 90-ой секунды

Планирование AEOLUS в атмосфере Марса. Подобрать управление, одновременно гасящее параболическую скорость и переводящее нас в коридор высоты 20 км без «отскока» не удалось, но дальность в 10860 км была реализована
Основной вывод — аэроторможение в атмосфере Марса вполне реально.
Из-за большого баллистического коэффициента AEOLUS начинает тормозиться только на малых высотах ( порядка 20 км и ниже). Что приводит к перегрузкам, недопустимым в пилотируемой миссии
Судя по отскоку «низэнько-низэнько», если чуть поменять закон управления на участке гашения скорости, то можно также выйти на глиссирующую траекторию по Зенгеру или перейти на промежуточную эллиптическую орбиту.
STARSHIP
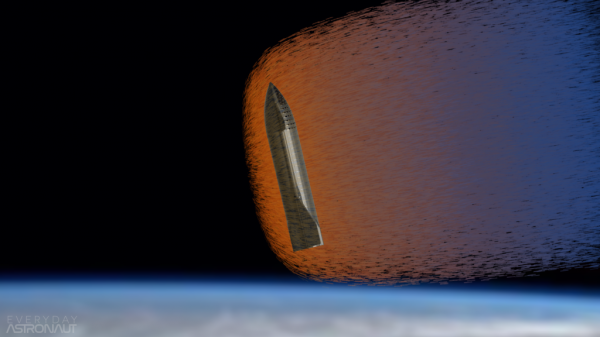
Старшип, тормозящий пузиком поперек потока. Материалы everydayastronaut.com
AELOUS — красивая идея, но он был задуман тридцать лет назад и не воплотился в железе до сих пор. Однако у нас есть Starship, который может быть завершен в ближайшие 5-ть лет. И посмотреть на его возможности было бы интересно.
Аэродинамика Starship
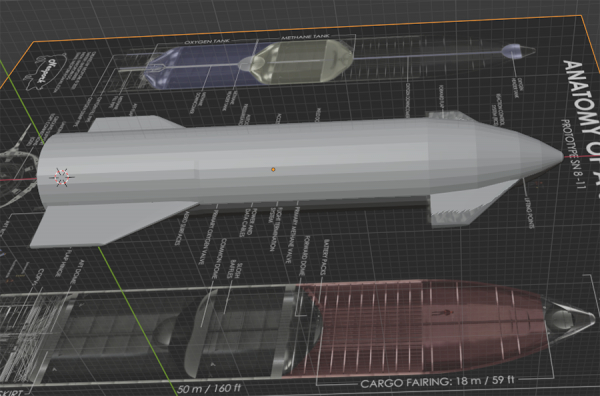
Модель «Старшипа» на фоне рефов от Neopork
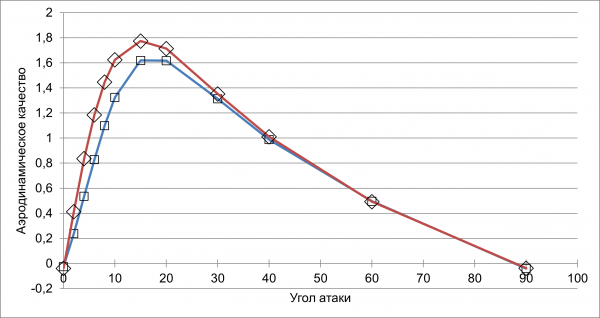
Аэродинамическое качество Старшипа для малых (Мах 4) и высоких (Мах 20) скоростей
Starship по своим схемным решениям радикально отличается от AEOLUS. Во-первых — затупленный носовой отсек, создающий достаточно большое лобовое сопротивление. Во-вторых — развитые аэродинамические поверхности (тоже с сильно притупленными передними кромками).
За счет переднего горизонтального оперения и крыла Starship тоже обладает достаточно высоким аэродинамическим качеством (1,62), но его баллистический коэффициент в разы ниже ( 2625 кг/м2).
Максимальное аэродинамическое качество Старшипа реализуется на большем угле атаки (~ 17 градусов)
Для гашения параболической скорости в сценарии Старшипа войдем в атмосферу плашмя, с углом атаки в 75 градусов (подъемная сила на таких углах атаки начинает падать, и мы избежим «отскока» от атмосферы).
Траектория Старшипа
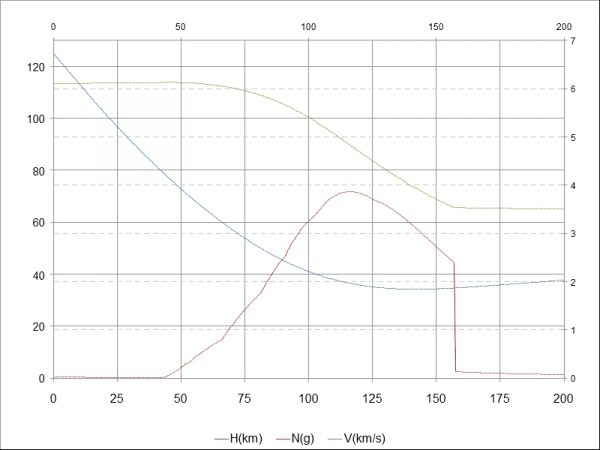
Торможение «объемного» Старшипа начинается намного раньше AEOLUSа, с ~ 70 км. Перегрузка не превышает 4 «g».
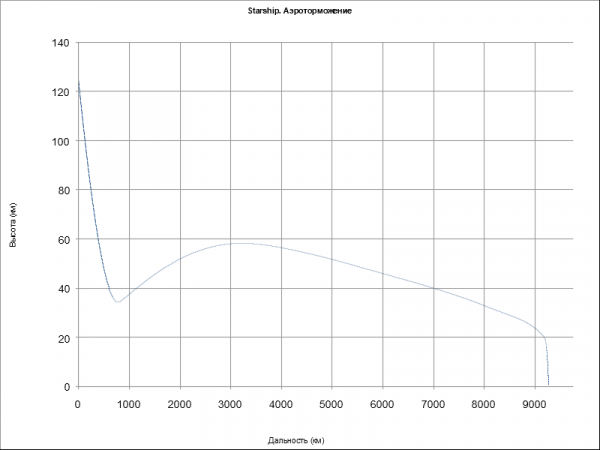
Вся траектория Старшипа от входа в атмосферу Марса до приземления
Д
Большее лобовое сопротивление и меньшее аэродинамическое качество несколько уменьшают дальность полета Старшипа и его боковой маневр, но летные качества все равно высокие. Максимальная дальность — 9270 км, боковой маневр — 630 км.
Сравнение AEOLUS и Starship
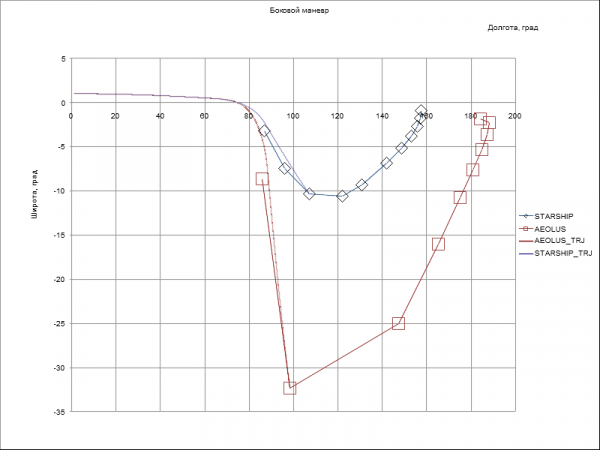
Сравнение бокового маневра Синяя линия — граница досягаемости «Старшипа», красная — AEOLUS
После всего number crunching можно сделать несколько выводов
Планирующий аэродинамический полет в атмосфере Марса действительно возможен
Аэроторможение в атмосфере Марса вполне реально
Для эффективного аэроторможения нужно сочетание высокого аэродинамического качества (для дальности) и низкого, а лучше — управляемого баллистического коэффициента (чтобы торможение плавно начиналось еще в верхних слоях атмосферы, и не превращалось в удар кувалдой с мощью 25 «же» на высоте 10 км)
Управляя интенсивностью торможения на участке торможения с параболической скорости, можно выйти на промежуточную орбиту, с которой затем можно спуститься в любую точку Марса
Перспективным решением в конструкции «марсианского» транспорта может быть изменяемая геометрия — поворотные и выдвижные консоли крыла, раскрываемые тормозные щитки
Для одноразовых десантных модулей — баллюты и надувные термощиты
Node.js — вполне себе инструмент для Rocket Science
На всякий случай — предыдущие заметки про программу расчета траекторий и программу расчета аэродинамики. Ссылки на соответствующие репозитории прилагаются